The Hole of Culture
Álvaro Siza’s Kulturforum competition entry
The following text consists of objects from our Main Galleries exhibition The fortune of the city is that it has never been perfect, running from 21 May 2026 until 6 January 2026, paired with Álvaro Siza’s handwritten notes, which have been transcribed in an ongoing, collaborative project.
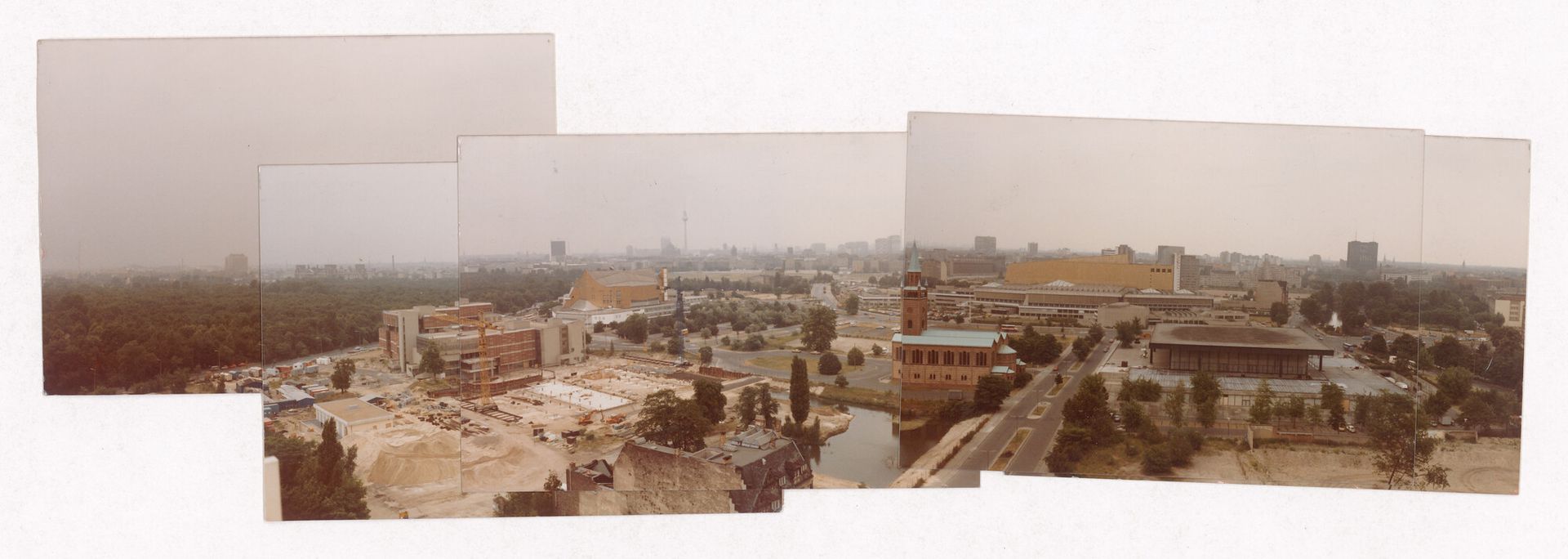
Álvaro Siza, Photographs of project site, Kulturforum, Berlin, ca. 1983. ARCH292942, AP178.S1.1983.PR04, Álvaro Siza fonds, CCA. Gift of Álvaro Siza
The competition for the Berlin Kulturforum, a disconnected urban area destroyed during the Nazi regime and by postwar planning, was part of the International Building Exhibition (IBA), a major urban renewal initiative to rebuild West Berlin. The main goal of the competition was to design a community centre and a central square and to redesign Potsdamer Strasse at the Kulturforum. Álvaro Siza’s competition entry focused on reestablishing broader connections between the site and the original urban fabric and integrating open and pedestrian spaces in the city.
Álvaro Siza, Sketchbook 151: Kulturforum, ca. 1983. ARCH292169_b, AP178.S2.1983.007, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
- 1
- The work was developed through a dialogue between two poles: that of [Architecture], centred on the space of the Kulturforum, bounded by that of planning, discovering the broad strokes of development and the barriers of Berlin (history, plans, back to [Architecture]).
In the background, the Wall. Some of the architectural elements are without doubt linked to planning decisions; the others must be related. Planning must encompass everything. - 2
- Architectural elements: the Kulturforum.
The Kulturforum is defined by Scharoun’s buildings. The first to be built—and the one that undoubtedly incorporated the concept of [Architecture] as a function of planning and as an intervening element—was also the first to be constructed. Mies’s role is more limited; nevertheless, Scharoun does not fail to take him into account when designing the library.
The librarycreates a sense of unity{it is the noise} of the Kulturforum concept, in relation to the urban fabric. Its form opens a hole and incorporates the former Philharmonic Hall into its surroundings; it “engulfs” Mies van der Rohe, creating his negative image within. In this way, it allows him to live on.
The Scharounian space is both an entity defined by volumes and a “contour” (surrounding) of architectural objects. This muscular, unstable, and extremely precarious balance is achieved, as far as the work is concerned, through the use of strong cores {(which become autonomous)} and surrounding elements that better shape the space.
Álvaro Siza, Sketchbook 151: Kulturforum, ca. 1983. ARCH292169_c, AP178.S2.1983.007, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
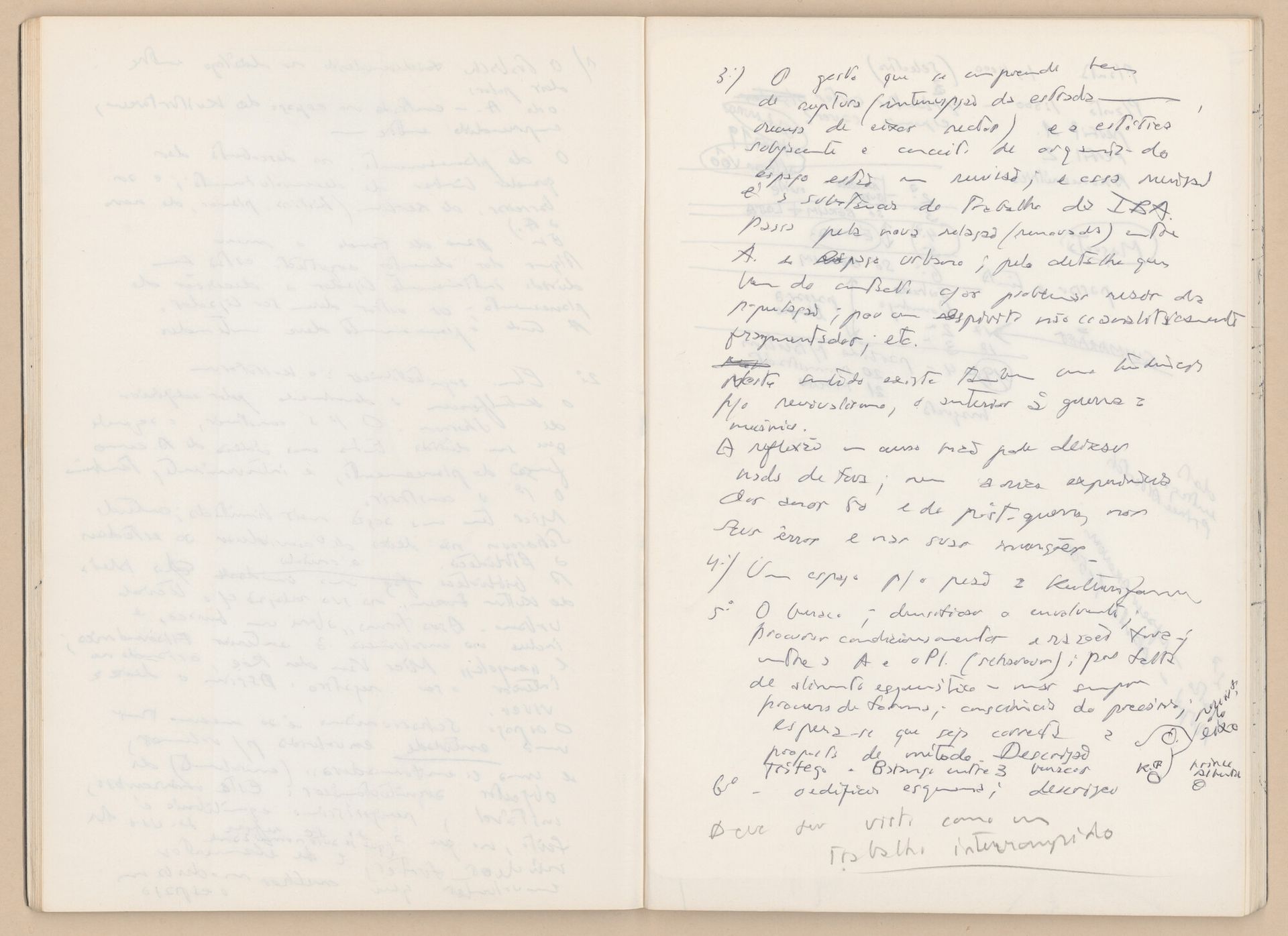
- 3
- The gesture undertaken involves rupture (an interruption of the road—a rejection of straight axes), and the aesthetics underlying the concept of converging spaces; and this convergence is the essence of IBA’s work.
It involves a new (renewed) relationship with urban disruption; the attention to detail that stems from grappling with the population’s real problems; a spirit that is not analytically fragmented; etc.
In this sense, there is also a tendency toward revivalism, specifically the pre-war era = machine.
The ongoing discourse cannot leave anything out—not even the rich experience of the 1950s and the postwar period, with all its failures and innovations. - 4
- A space for pedestrians = Kulturforum
- 5
- The hole; taming the surroundings; seeking key constraints and reasons; between Architecture and Planning (Scharoun); a strange lack of [design] substance—but always a search for form; awareness of precariousness; it is hoped that the proposed method is correct. Description
Traffic. [ ] between 3 holes
{Text inserted on the right of the page} {[ ]} - 6
- The building as a schematic; outline
Álvaro Siza, Sketch of the Berlin Philharmonic designed by Hans Scharoun, July 1983. ARCH281734_022, AP178.S2.1983.005, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
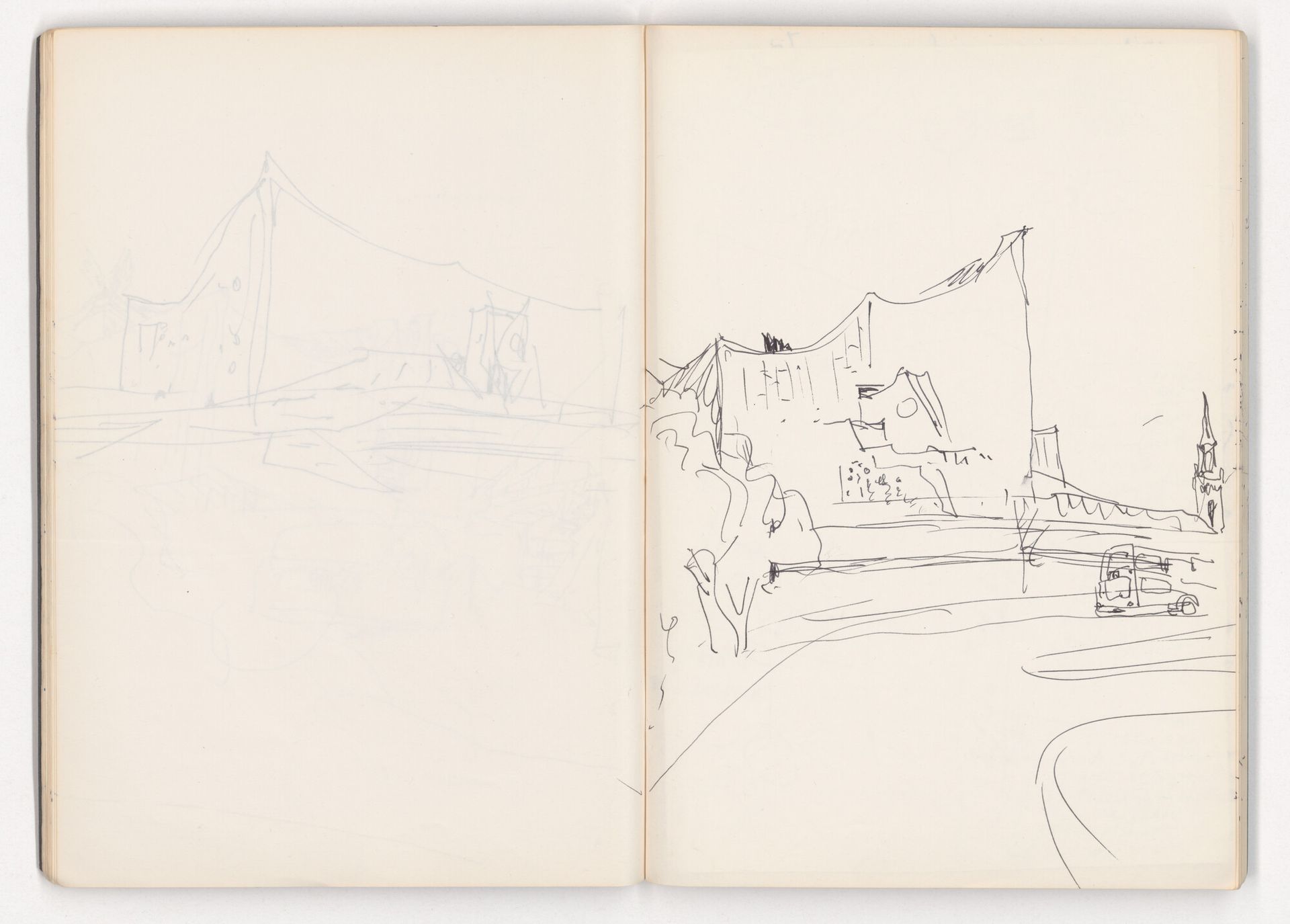
Siza’s proposal started with existing buildings: Hans Scharoun’s State Library and Philharmonic, Mies van der Rohe’s New National Gallery, James Stirling and Michael Wilford’s Social Science Centre, and the nineteenth-century St. Matthew’s Church. The Kulturforum was a cultural complex of monumental buildings, each completely disconnected from the others. Siza aimed to transform the forum into a series of defined, open spaces that would preserve each building’s autonomy while creating a coherent architectural dialogue between them.
Álvaro Siza, Sketchbook 147: Kitta Proj. - Kulturforum, July 1983. ARCH281734_003, AP178.S2.1983.005, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
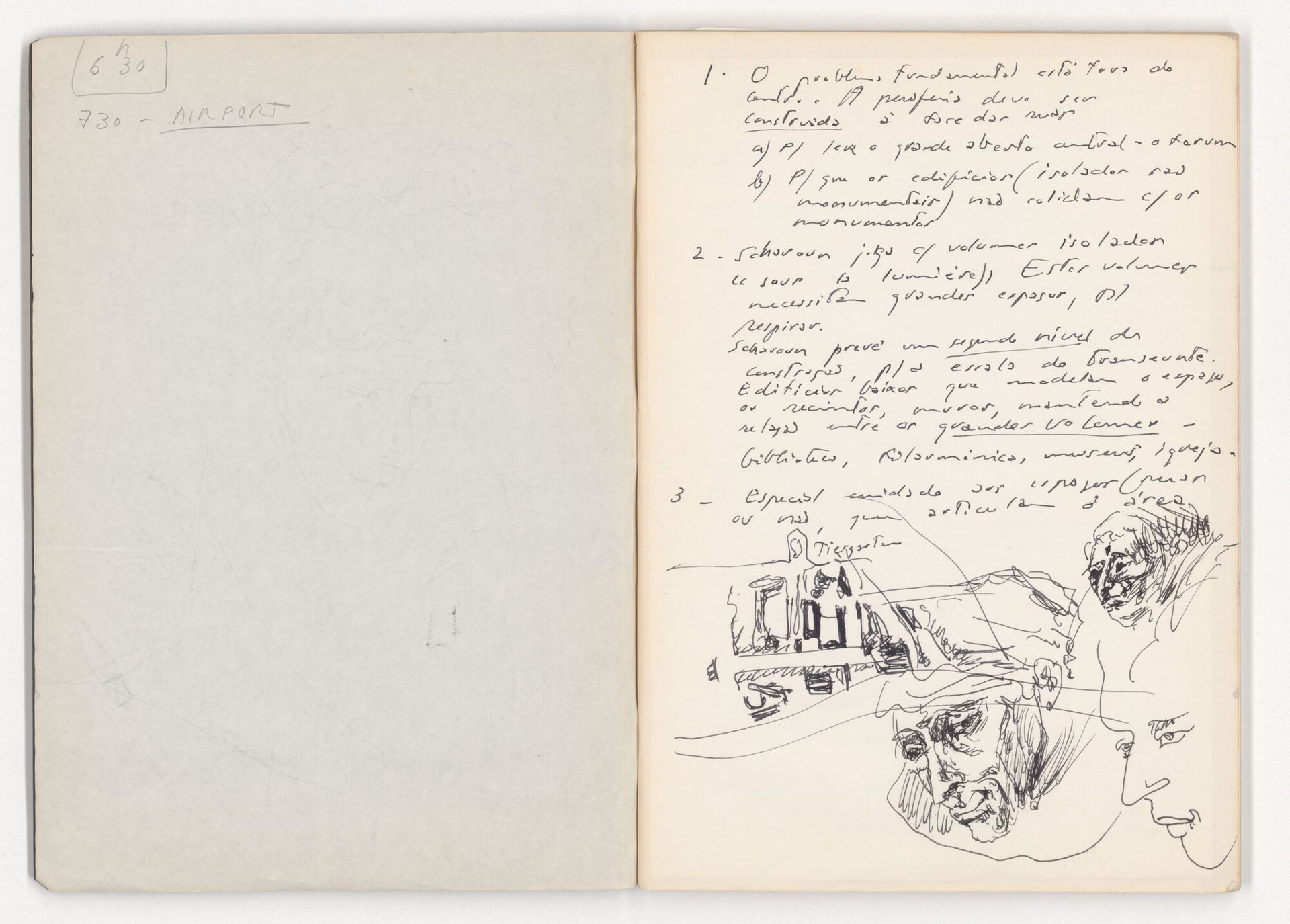
- 1
- The fundamental problem is outside the centre. The periphery must be built [against the backdrop of the ruins]
- a.
- To bring the large central opening to the forum
- b.
- So that the buildings (which, when isolated, are monumental) do not clash with the monuments
- 2
- Scharoun plays with isolated volumes “[cast under light].” These volumes need large spaces to breathe. Scharoun envisions a second level of construction, for the scale of the passers-by. Low-rise buildings that shape the space, the enclosures, walls, maintaining the relation between the large volumes—library, philharmonic, museums, church.
- 3
- Special care to the spaces [ ] or not that connect the area.
{Tiergarten}
Álvaro Siza, Sketchbook 147: Kitta Proj. - Kulturforum, July 1983. ARCH281734_009, AP178.S2.1983.005, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
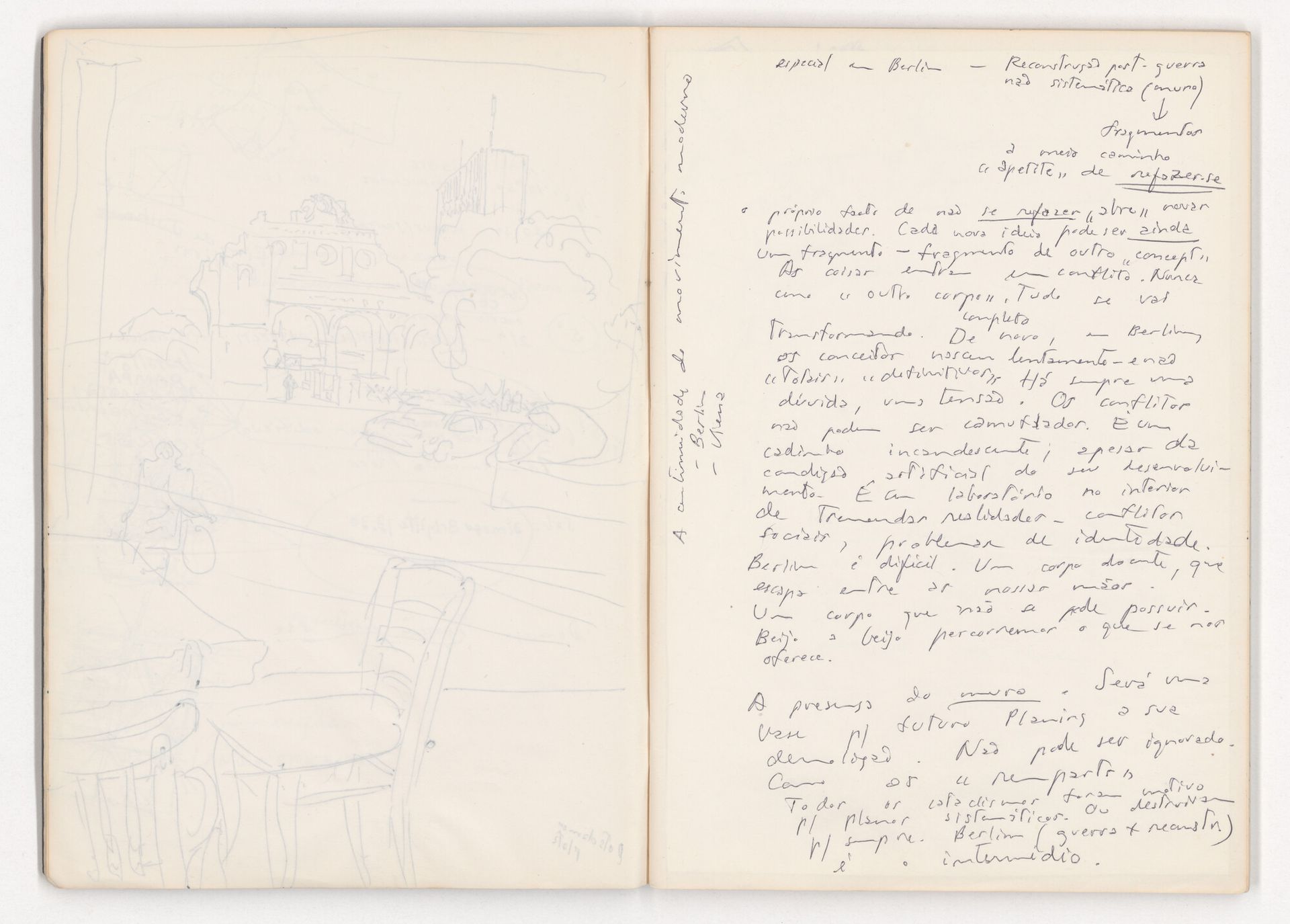
[…]
The very fact that it is not rebuilt “opens up” new possibilities. Each new idea can still be a fragment—a fragment of another “concept.” Things caught in a conflict. Never as another “concept.” Everything is {completely} transforming. Once again, in Berlin, concepts are born slowly—and not “total” or “definitive.” There is always a doubt, a tension. Conflicts cannot be camouflaged. It is a glowing crucible, despite the artificial nature of its development. It is a laboratory within tremendous realities: social conflicts, identity issues. Berlin is difficult. A sick body that slips through our fingers. A body that cannot be possessed—kiss by kiss we traverse what is offered to us.
The presence of the wall. Its demolition will be a [voice] for the future, for [longings]. It cannot be ignored. With the “[ramparts].” All cataclysms have been the reason for systematic plans. Or destructive forever. Berlin (war vs. reconstruction) is the middle ground.
[…]
Álvaro Siza, Sketchbook 147: Kitta Proj. - Kulturforum, July 1983. ARCH281734_028, AP178.S2.1983.005, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
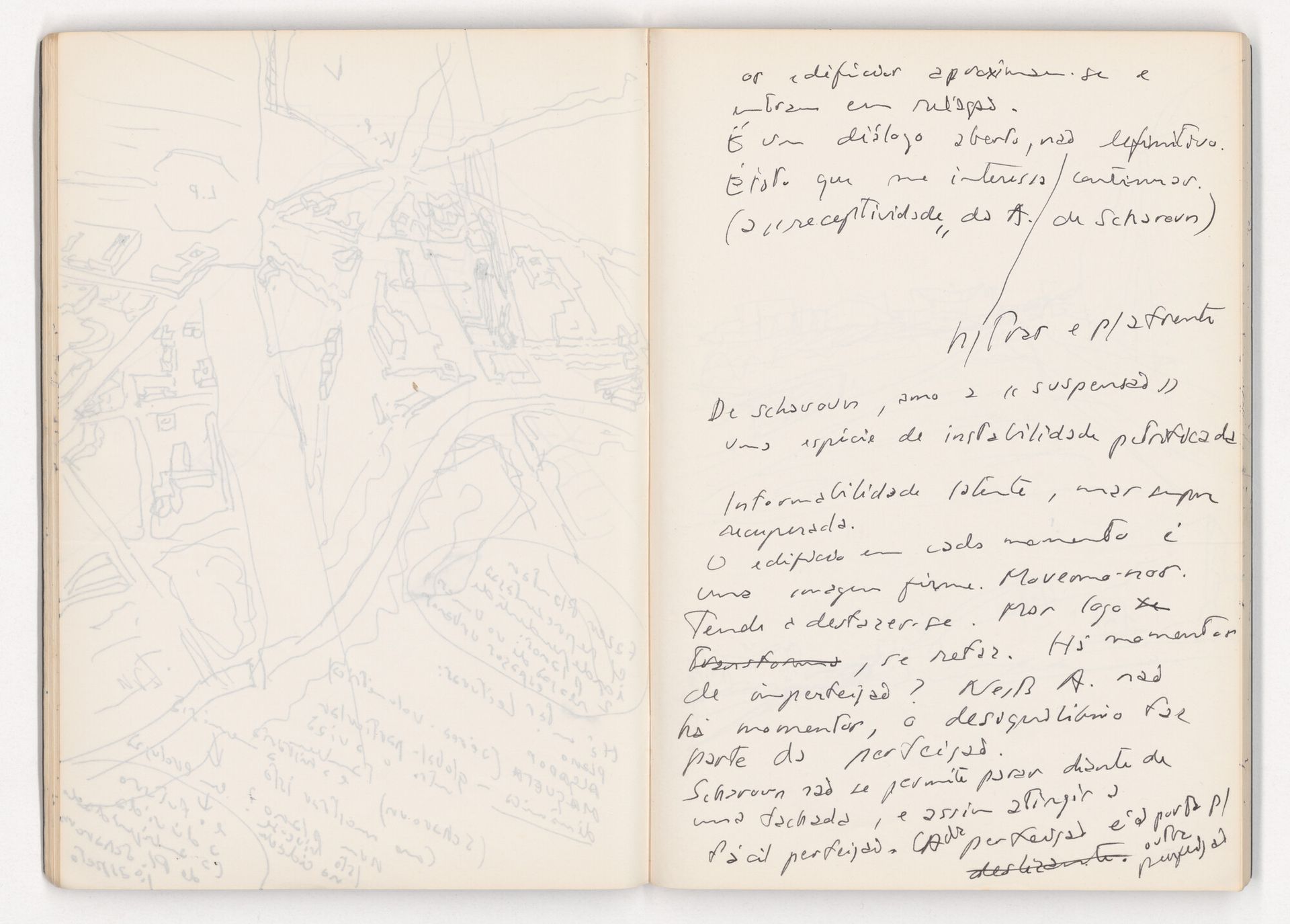
The buildings draw closer and enter into a relationship. It is an open, non-definitive dialogue.
{↓ The following text inserted below}
{back and forth}
This is what I am interested in pursuing.
(the “receptivity” of Scharoun’s [Architecture])
What I love about Scharoun is the “suspension” of his buildings:
A kind of petrified instability, a latent informality, yet always restored.
The building, at every moment, is a steadfast image. We move. It tends to fall apart. But soon it transforms, rebuilds itself. Are there moments of imperfection? In this architecture, there are no moments; imbalance is part of perfection. Scharoun does not allow himself to stop in front of a facade and achieve perfection easily. Every perfection is a gateway sliding to another perfection.
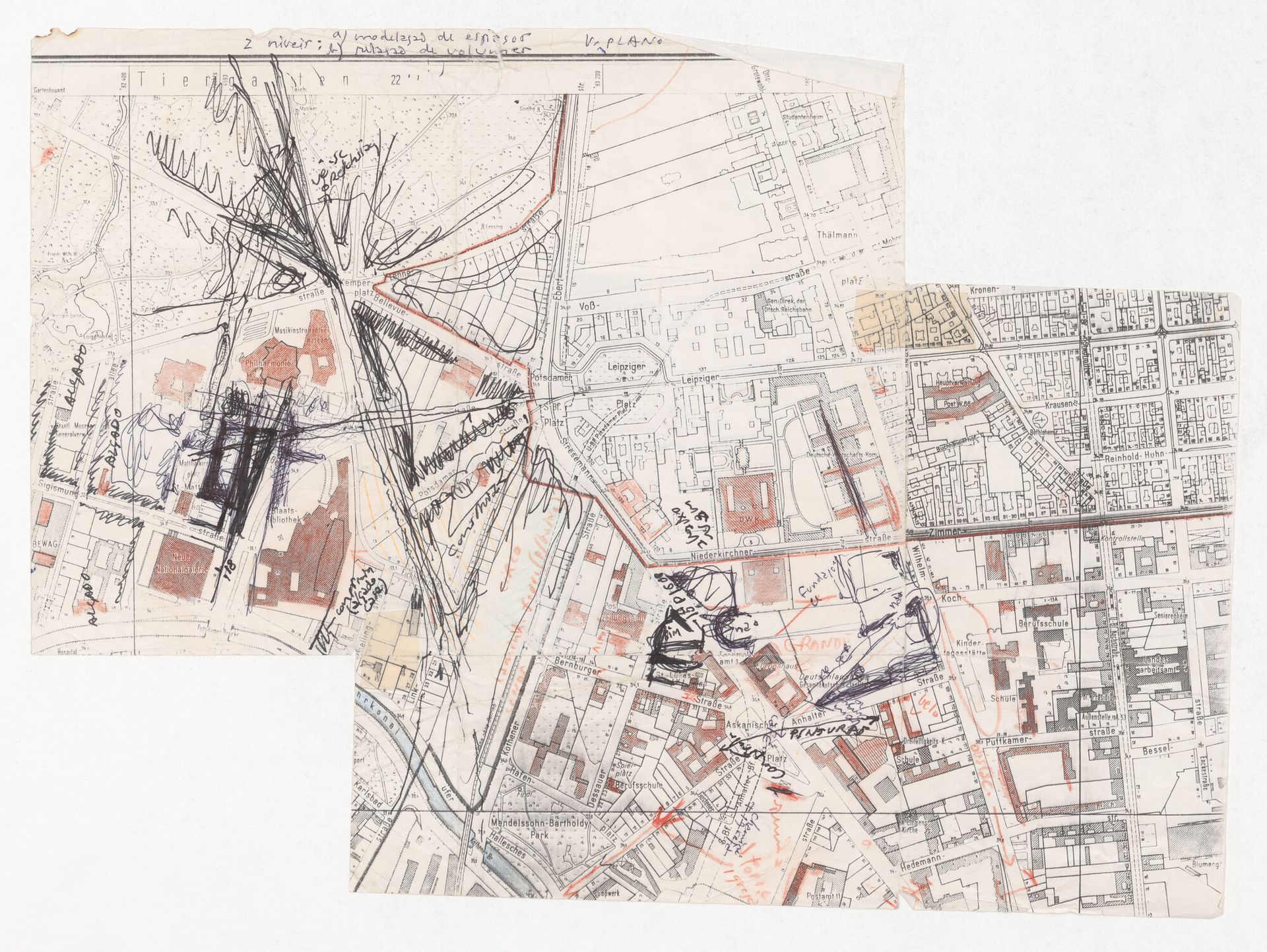
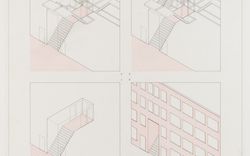
Álvaro Siza, Plan for Kulturforum, Berlin, ca. 1983. Collage of reprographic copies with ink and coloured pencil on paper. ARCH290823_001, AP178.S1.1983.PR04, Álvaro Siza fonds, CCA. Gift of Álvaro Siza
Siza’s approach to the Kulturforum’s open spaces aimed for total freedom of movement. To do so, he recommended burying the traffic-heavy Potsdamer Straße to reclaim its surface area as a public space. A partially covered bridge across the Landwehrkanal connected the forum to the south and created pedestrian access. Siza proposed a uniform stone-slab pavement across the entire area and intentionally omitted greenery and fixed urban furniture, transforming the site into an open, flexible space.
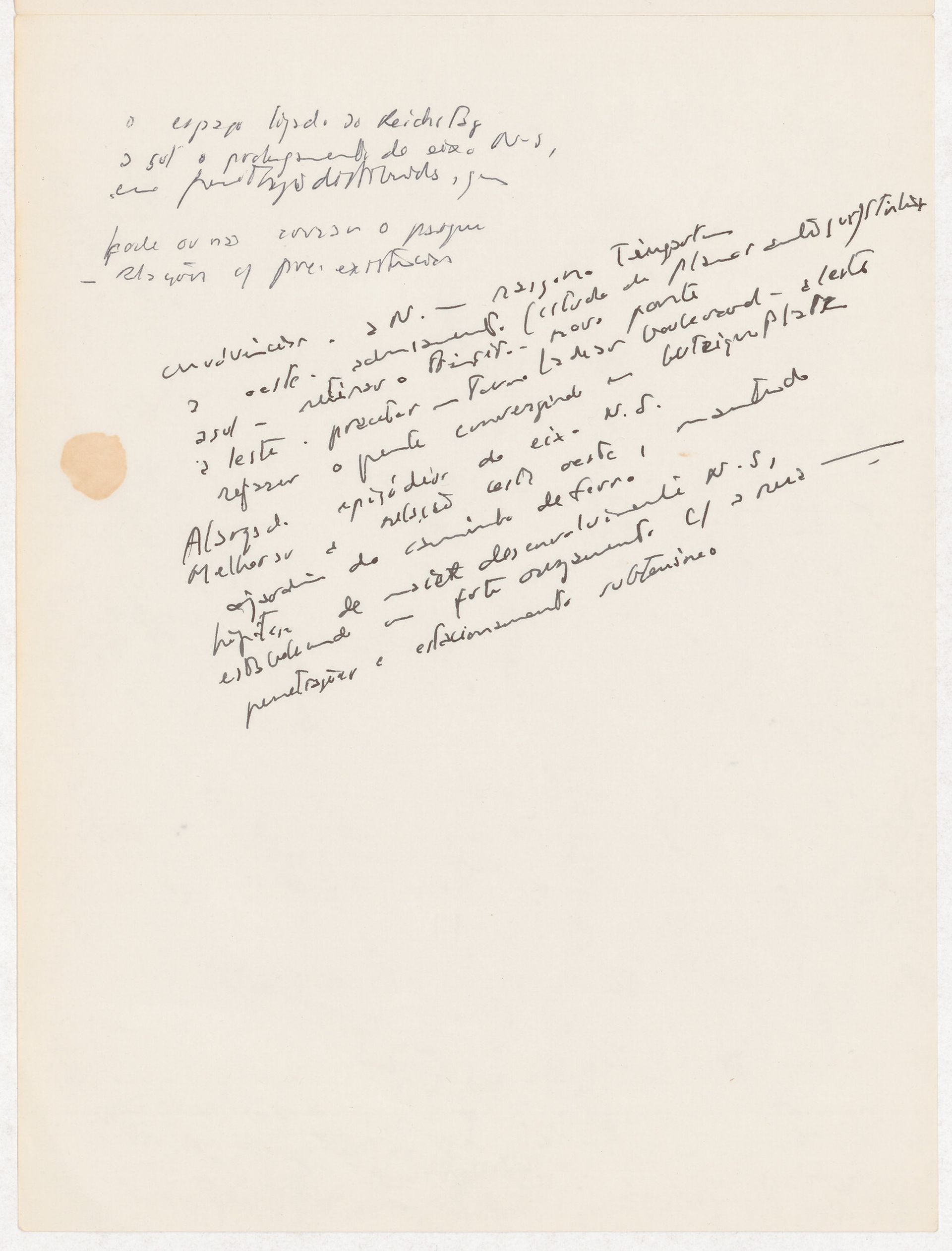
Álvaro Siza, Sketchbook 168: Prince Albrecht, ca. 1983. ARCH281738_003, AP178.S2.1983.012, fonds Álvaro Siza, CCA. Gift of Álvaro Siza © Álvaro Siza
The area connected to the Reichstag to the south is an extension of the north-south axis, with distributed access points that may or may not cross the park—relationships with existing structures.
Surroundings. To the north—cut through the Tiergarten
To the west—densification (planning study) by Stirling
To the south—traffic retreats—new bridge
To the east—small squares flanking the boulevard—to the east
Rebuild the bridge converging at [Lützowplatz]
Extended sections of the N-S axis.
Improve the east-west connection, maintaining the railroad garden possibility of greater N-S development, establishing a strong intersection with the street—punctures and underground parking.
Álvaro Siza, Sketchbook 168: Prince Albrecht, ca. 1983. ARCH281738_004, AP178.S2.1983.012, fonds Álvaro Siza, CCA. Gift of Álvaro Siza © Álvaro Siza
- 1
- Scope and Objectives of the Study
- 2
- The current situation of the Cultural Forum [ ] {reflects} the history of a site that is {predestined and, for that very reason, subject} to successive planning interventions in step with the vicissitudes of [ ]
{The following text is encircled}
{From Speer’s axis, a powerful anchor for earlier projects, to Scharoun’s Plan, a reflection of the desire to erase the past, and of the anxious optimism of the postwar period, latent in the widely participated-in debate of recent years. The result is a hole in the center of another hole: the sparse surrounding area, destroyed by war and subsequent planning efforts.}
Speer establishedThrough the Nazi regime, {Speer establishedthrough Speer’s {design}, established in the plan} pre-existing tendencies fromsuccessive plansfor the formation of a clearly defined north-south axis, starting from and extending east of the location [ ]
Scharoun, reflecting the anxious optimism of the postwar period, the desire to change anything reminiscent of the past, designed [ ] a [ ] {wide} road [ ] whose alignment determines the shape of his library in its relationship with the philharmonic, which, on the north-south axis, also interrupts Potsdamer Strasse.
The current IBA study follows the previously formulated trend, abandoning the highway and proposing a closer connection between avenues and streets.
{The controversy surrounding the successive revisions of the Scharoun plan reflects the current climate of indecision}
{↓ The following text inserted below}
{In the abandonment of the analytical spirit that [ ] of zoning; the restoration of traffic flows, the isolated object, the degradation of the city’s slow fragmentation that some brilliant works had maintained [ ]}
The result is a hole in the center of another hole: the sparsely populated area surrounding the forum, destroyed by war and {initiated} subsequent development.
The void, indeed: Berlin, Berlin, an island within East German territory, separated from its other half by a wall.
[…]
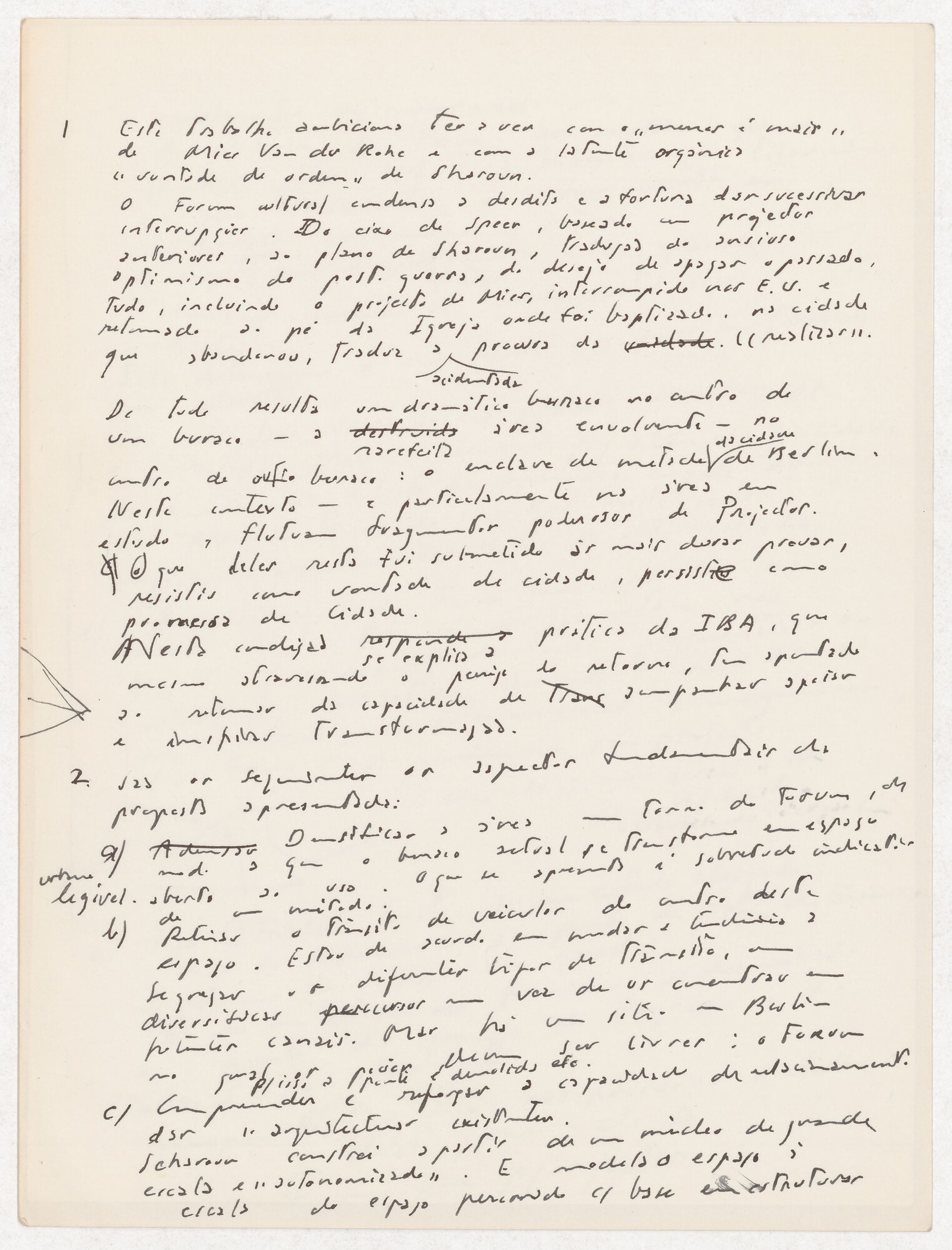
Álvaro Siza, Sketchbook 168: Prince Albrecht, ca. 1983. ARCH281738_005, AP178.S2.1983.012, fonds Álvaro Siza, CCA. Gift of Álvaro Siza © Álvaro Siza
- 1
- This ambitious project draws on Mies van der Rohe’s “less is more” and Scharoun’s organic “desire for order.”
The Forum [ ] condemns [ ] and unbridled wealth [ ]. From Speer’s cycle, based on projects predating Scharoun’s plan, a reflection of postwar optimism and the desire to erase the past, everything, including Mies’s project, which was interrupted in the U.S. and resumed near the church where he was baptized, in the city he abandoned—it conveys the {tumultuous} quest forcuriosity. “to restore.”
The result of all this is a dramatic hole in the center of a hole—thedestroyed, {sparse} [surrounding] area—in the center of another hole: the enclave comprising half of {the city of} Berlin. In this context—which I will not specifically examine—a fluctuation [ ] power of projects. What remains of it was meant to last longer [ ], resisted as the city’s will, and persists as [ ] of the city.
These conditionsrespond to{replicates} the practice of the IBA, which even [ ] the [ ] of return, [storm] of regaining the capacity fortrans[ ] transformation.
[…]
Álvaro Siza, Sketchbook 168: Prince Albrecht, ca. 1983. ARCH281738_002, AP178.S2.1983.012, fonds Álvaro Siza, CCA. Gift of Álvaro Siza © Álvaro Siza
[…]
The Forum’s development will be more carefully considered than that of the major hubs: the library, the Philharmonic and its extensions, the new museums under construction, and the Mies Museum.
The entities to be introduced {agora} among these larger bodies belongs to the world of these [surrounding] entities. This determined its volume: two stories surrounding a cloister. On the other hand, its form aims to contribute to the Mies-Scharoun integration—beyond mere quality.
The eastern enclosure of the library is responsible for defining the Praça do Avenue along the north-south axis in this sector and for supporting the library in the absence of the highway.
[…]
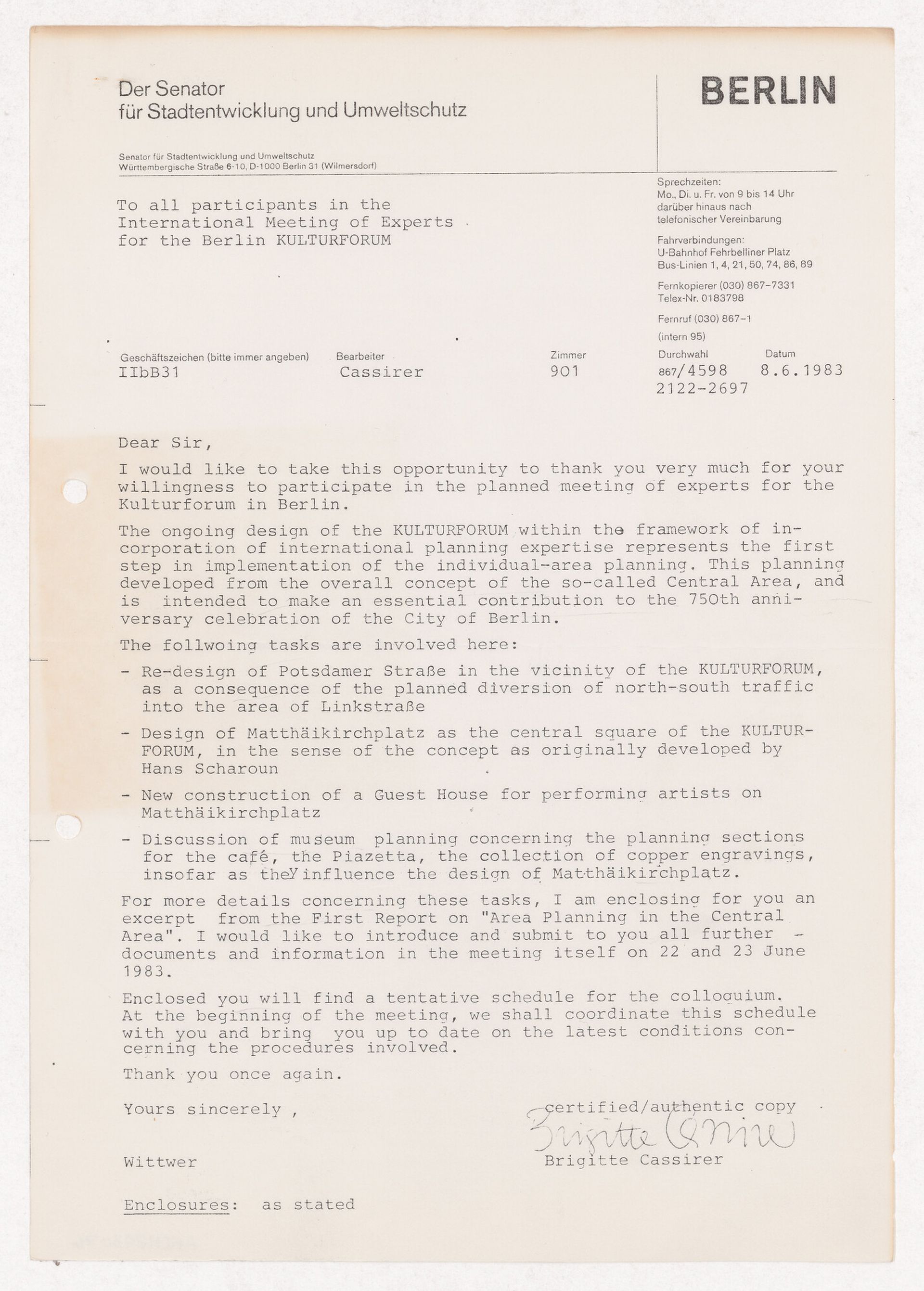
Invitation from Brigitte Cassirer to submit a design proposal to the Berlin Kulturforum project, 8 August 1983. ARCH293057, AP178.S2, Álvaro Siza fonds, CCA. Gift of Álvaro Siza
Siza’s proposal for the new community centre—a rectangular building with a central courtyard—defined one side of the Kulturforum. Its corners aligned with its neighbours, the New National Gallery, St. Matthew’s Church, and the Philarmonic, defining some of the new public, open spaces. The building’s position relative to the church created a south-facing plaza looking out to the gallery. On the north side, the building’s rigid geometry breaks to create another plaza oriented toward the Philharmonic. Ultimately, Siza’s proposal was not selected by the jury who favoured Hans Hollein’s approach.
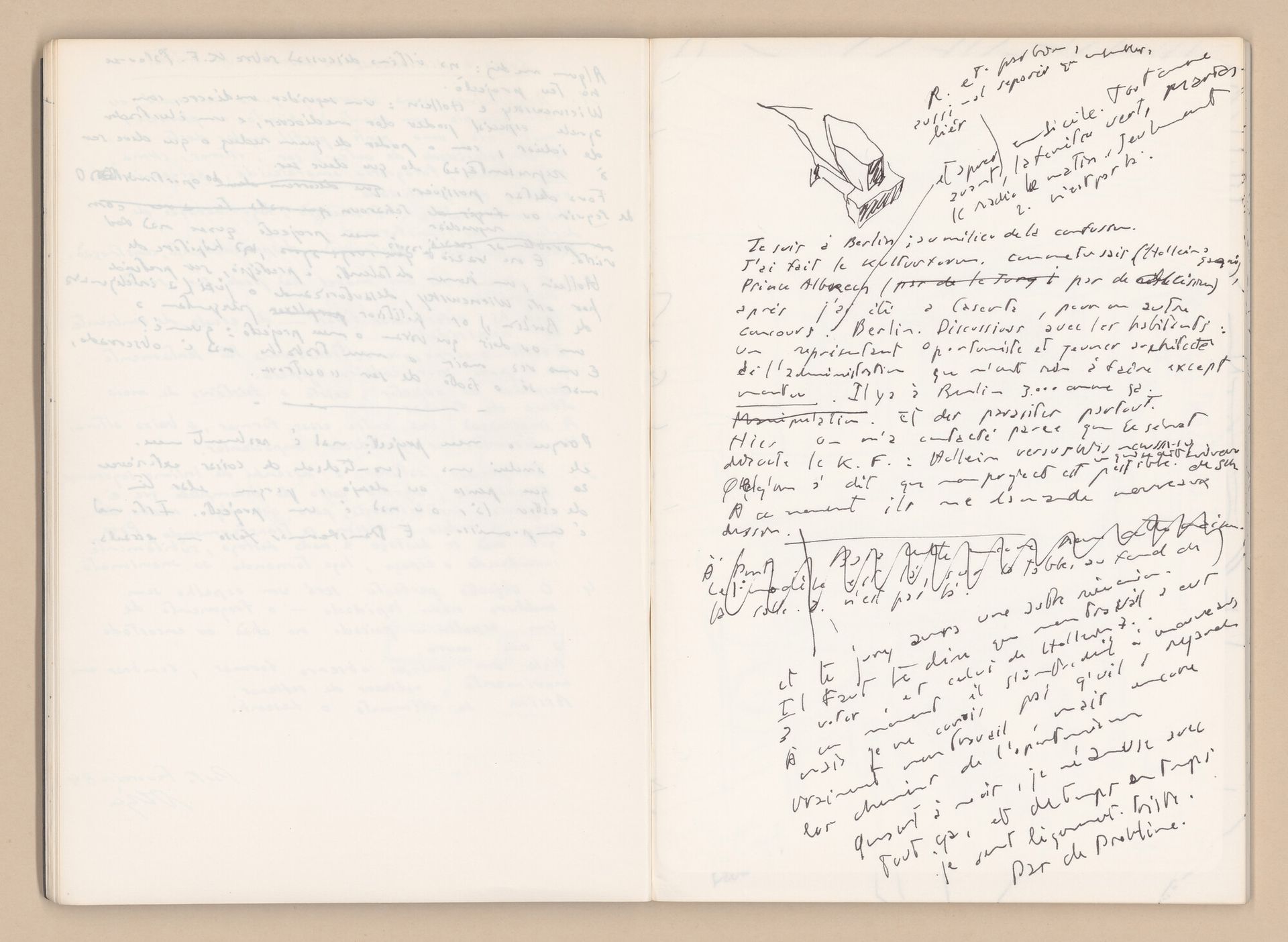
Álvaro Siza, Sketchbook 168: Berlin Elder’s Club R., February 1984. ARCH281743_016, AP178.S2.1984.006, Álvaro Siza fonds, CCA. Gift of Álvaro Siza © Álvaro Siza
{Geometric sketch of the Berlin State Library by Hans Scharoun}
I’m in Berlin; in the midst of the chaos.
I designed the [Kulturforum], as you know (Hollein won).
[…] after that, I went to Caserta for another competition.
[…]
Someone said that my project is feasible. At that point they asked me for new drawings.
{[-]}
and the jury will have [another meeting]. It must be said that my proposal [received 3 votes,] and Hollein’s [7]..
At one point [ ], but I don’t know if they’re really looking at my work; rather, as far as I can tell, their approach to the project, I have nothing to do with any of it [ ]
No problem.